Intelligente Assistenz- und Prüfrobotik für die manuelle Produktion
Mensch und Maschine als Einheit
-
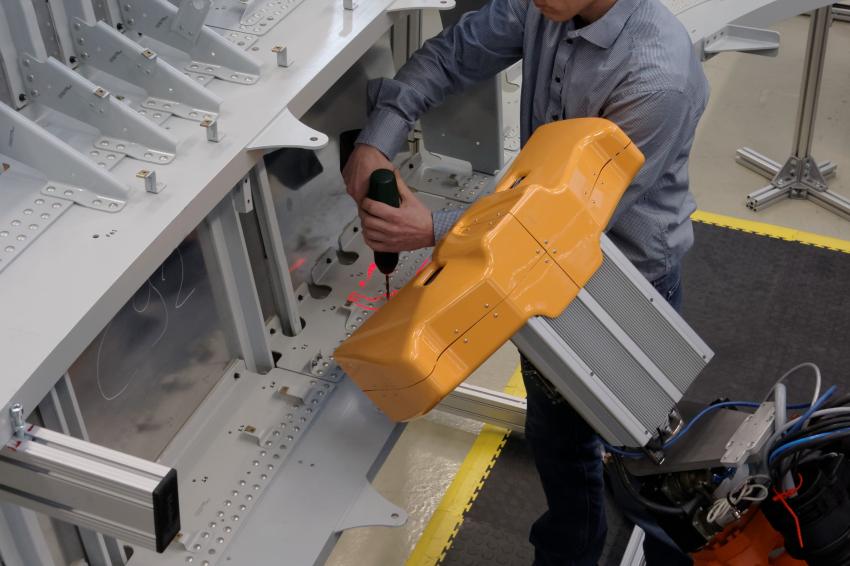 Durch einen Roboter assistierter Montageprozess in der Flugzeugfertigung.
Durch einen Roboter assistierter Montageprozess in der Flugzeugfertigung. -
 Der Sensorkopf dient gleichermaßen dem Erfassen von Montagezustandsinformationen und der Projektion von Montageanweisungen auf das Bauteil.
Der Sensorkopf dient gleichermaßen dem Erfassen von Montagezustandsinformationen und der Projektion von Montageanweisungen auf das Bauteil.
Individualisierte Produkte sind schon lange Realität – Turnschuhe bekannter Markenhersteller sind das beste Beispiel hierfür. Doch um Produkte nach Kundenwunsch innerhalb kürzester Zeit fertigen zu können, sind kollaborierende Roboter notwendig. Das Forschungsprojekt E³-Produktion des Fraunhofer IFF will anhand eines roboterbasierten Assistenz- und Prüfsystems zeigen, wie das Hand-in-Hand-Arbeiten von Mensch und Maschine mithilfe von optisch messender Sensorik umgesetzt werden kann.
Im Zeitalter von Industrie 4.0 stehen Unternehmen vor einem Umbruch. Verbraucher und Kunden interessieren sich immer häufiger für individualisierte Produkte, wodurch die Massenproduktion an Stellenwert verliert. Damit die betroffenen Betriebe trotz dieser Entwicklung im internationalen Wettbewerb bestehen können, müssen sie ihre gegenwärtigen Produktionsanalagen flexibilisieren. Eine aussichtsreiche Möglichkeit dieses Ziel zu erreichen, ist der vermehrte Einsatz von assistierenden Robotern, die Hand in Hand oder Seite an Seite mit Menschen interaktiv zusammenarbeiten. Das Fraunhofer IFF in Magdeburg beschäftigt sich im Forschungsprojekt „E³-Produktion“ mit dieser Thematik und hat sich unter anderem zum Ziel gesetzt, Methoden zu entwickeln, mit denen Menschen noch besser in die Produktion der Zukunft einbezogen werden. Dazu wurden am Beispiel der Flugzeugfertigung ein intelligentes roboterbasiertes Assistenz- und Prüfsystem entwickelt und die Synergie aus Mensch und Maschine untersucht.
Einbindung des Menschen in die Produktion der Zukunft
Die rasant wachsende Individualisierung und Vielfalt industriell herzustellender Produkte erfordert zunehmend neue Fertigungsstrukturen, um eine effiziente und wirtschaftliche Produktion mit hoher Qualität sicherzustellen. Dies trifft insbesondere Montageprozesse für komplexe Produkte mit hoher Variantenvielfalt und kleiner Losgröße, wie sie beispielsweise in der Großteilfertigung zu finden sind. Neben starrer oder auch roboterbasierter Automatisierung bieten die in den vergangenen Jahren entwickelten Ansätze der Mensch-Roboter-Kollaboration (MRK) Potenzial zur Qualitäts- und Produktivitätssteigerung im Übergangsbereich zwischen herkömmlichen Automatisierungslösungen und anspruchsvollen manuellen Tätigkeiten. Es ist zu erwarten, dass assistierende MRK-Lösungen in der Smart Factory von Morgen einen hohen Stellenwert einnehmen. Hierfür ist die Entwicklung von Technologien mit dem Ziel leistungsstarker Assistenzsysteme mit kognitiven Fähigkeiten eine aktuelle Herausforderung.
Aus Anwendersicht hingegen besteht eine große Herausforderung darin, trotz kleiner Fertigungslose und damit häufig wechselnden Arbeitsaufgaben für manuelle, subjektiv beeinflusste Montageprozesse ein fehlerfreies Arbeitsergebnis und für die Arbeitsperson beherrschbare Arbeitsanforderungen zu schaffen. Eine derartige hochflexible manuelle Montage muss zukünftig durch technische Assistenzsysteme unterstützt werden, die auf das individuelle Vorgehen der Arbeitsperson reagieren, sich ihr anpassen und kontextabhängig unterstützen.
Anwendungsszenario Flugzeugfertigung
Die Montage von Komponenten in der Flugzeugfertigung ist durch eine hohe Anzahl variantenreicher Einzelteile gekennzeichnet. Für ein effektives Arbeiten und ein fehlerfreies Arbeitsergebnis ist es erforderlich, die Arbeitsperson zu unterstützen. Das entwickelte roboterbasierte Assistenz- und Prüfsystem bietet hierfür enormes Potenzial. Die Unterstützung besteht unter anderem darin, dass das Assistenzsystem mithilfe von optisch messender Sensorik das aktuelle Arbeitsergebnis, also die Montage von Einzelkomponenten, überprüft und kontextabhängig Montagehinweise gibt.
Das Assistenz- und Prüfsystem ist in der Lage, den geplanten (Soll) und aktuellen (Ist) Montagezustand und die aktuell durchgeführte individuelle Montagehandlung datentechnisch und sensorisch zu erfassen, algorithmisch zu interpretieren, in Echtzeit zu bewerten und die Präsentation von Assistenzinformation intelligent und dynamisch zu planen. Wenn Abweichungen vom geometrischen Soll-Zustand oder vom digitalen Montageplan erkannt werden so werden entsprechende Korrekturhinweise adaptiv und kontextabhängig generiert. Damit dieser Prozess trotz der Teilevielfalt und Individualität von Flugzeugsektionen automatisch und adaptiv durchgeführt werden kann wurden die entsprechenden Soll-Information digital an die eigens entwickelte Analyse-Software angebunden. Diese reagiert jedoch nicht nur auf Differenzen, sondern erkennt, ob es sich um fehlende oder falsche Teile handelt oder ob das korrekte Bauteil lediglich falsch montiert wurde. Diese Fähigkeit, den Montagezustand zu interpretieren, ist eine wichtige Grundlage für die Generierung kontextabhängiger Korrekturhinweise.
Aufgrund der Größe des Arbeitsraumes in der Flugzeugfertigung und der Mobilität der Arbeitsperson muss auch das System entweder mobil oder eine große Reichweite haben. Beide Varianten haben sich als geeignet erwiesen, sowohl ein 7-Achs-Großroboter als auch ein autonomer mobiler Roboter, welcher, dem Montageplan entsprechend seine Prüfpositionen ermittelt. Eine optische Arbeitsraumüberwachung, drucksensitive Fußmatten und berührungsempfindliche Roboterverkleidung haben sich als hilfreich erwiesen, die Interaktion zwischen Mensch und Roboter sicher zu gestalten. Es ist davon auszugehen, dass vor allem aus ökonomischer Sicht und der Ortsunabhängigkeit mobile Roboter zukünftig die bedeutendere Rolle spielen werden.
Weiterentwicklung kognitiver Fähigkeiten für ein echtes Hand-in-Hand-Arbeiten von Mensch und Maschine nötig
Zukünftig erfordern die zahlreichen Aspekte der flexiblen werkerindividuellen Assistenz und der sicheren Interaktion weitere hoch-innovative technische und algorithmische Lösungen. Denn die Effektivität und der Mehrwert eines intelligenten Assistenz- und Prüfroboters ergibt sich insbesondere daraus, dass es seine Handlungen selbstständig, dynamisch und vorausschauend plant und damit eine Effizienz erreicht, die aufgrund der Komplexität der Abläufe durch manuelle Programmierung nicht oder nur mit sehr hohem Aufwand erreichbar ist. Die Bewegungen und Assistenzfunktionen werden zusätzlich nicht nur dem aktuellen Montagezustand, sondern auch den Bedürfnissen der individuellen Werker angepasst. Das bedeutet, dass sich insbesondere die kognitiven Fähigkeiten weiterentwickeln müssen, damit ein echtes Hand-in-Hand-Arbeiten von Mensch und Maschine Realität werden kann, bei dem beide aufeinander eingehen. Denn die Aktionen des Werkers, seine (Montage-)Handlungen und Reihenfolgen, seine Laufwege und individuellen Assistenzbedürfnisse sind zunächst nicht bekannt oder vorhersehbar und müssen sukzessive vom kognitiven Assistenzsystem, seinen Sensoren und Algorithmen, gelernt und später kontextabhängig interpretiert werden. Dabei muss auch die Interaktionsfähigkeit des Assistenzsystems bidirektional sein und dem Werker beispielsweise die Möglichkeit geben, Unterstützung abzulehnen bzw. zusätzliche oder alternative anzufordern.
Kontakt
Fraunhofer Gesellschaft e.V.
Hansastr. 27c
80686 München
Bayern, Deutschland
+49 89 1205 1300
+49 89 1205 7515